ПСИХУШКА ЗА ПОБЕГ ИЗ ДЕТДОМА
Две недели назад в Гражданскую комиссию по правам человека поступило очередное сообщение по поводу того, что 15-летнего подростка поместили из обычного детского дома в психиатриче..
| Мой путь в немецкую клинику
Немецкая медицина является для многих врачей одним из эталонов качества, надежности и мастерства. Это и неудивительно - мне, как хирургу, в своей повседневной клинической деятельно..
| Как сдавать PLAB экзамены
лицензии на работу врачом в Великобритании. Однако ему должна предшествовать успешная (с проходным баллом 7) сдача теста по английскому языку (IELTs)...
| Каким быть ногтям медицинского работника
Всемирная организация здравоохранения (ВОЗ) обращает внимание на то, что искусственные акриловые ногти способствуют сохранению контаминации рук после использования мыла или содержа..
| Охота на фармацевтов и врачей
Две трети судебных юристов США, зарабатывающих на процентах от отсуженных компенсаций пострадавшим, специализируются на "медицинских" процессах - исках к производителям лекарств и..
| Клонирован мочевой пузырь
Клонирование человека - дилемма. Клонирование отдельных органов - мечта. Возможность менять старые, отработавшие, больные органы на новые будоражит умы и врачей, и пациентов. Актуа..
| Наш мир в возрасте 84 лет 14 апреля 2003 года покинула Любовь Трофимовна Малая, Герой Украины, Герой Социалистического Труда, кавалер ордена Трудового Красного Знамени; орденоносец..
| Робототехника в хирургии
роботы хирургия робототехника роботы в хирургии хирургическая операция эндоскопическая операция
Робототехника в хирургии
Проведение хирургических операций с помощью роботов уже не является сюжетом из научно-фантастического произведения. Использование их в клинике стало не просто возможным, но и весьма перспективным. Хотя у большинства людей "робот" ассоциируется с именем Айзека Азимова, первым этот термин ввел чешский писатель Карел Чапек для обозначения механизма, обладающего так называемыми антропоморфными свойствами.
На производстве и в научных исследованиях применяются промышленные роботы - программно-управляемые автоматические манипуляторы, выполняющие рабочие операции со сложными пространственными перемещениями. Доктор Davies в своей работе, посвященной достижениям робототехники, дал следующее определение
для робота, используемого в хирургических целях: "… управляемая система, наделенная чувствительностью и запрограммированная для выполнения движений и манипулирования инструментами при проведении хирургических операций". Следует подчеркнуть, что задачей робота является не замещение хирурга, а расширение спектра его возможностей.
Роботов, используемых в хирургии, можно разделить на пассивных, полуактивных и активных.
Пассивный робот предназначен, как правило, для удержания инструмента в определенном положении, что облегчает выполнение и увеличивает точность какого-либо этапа оперативного вмешательства. Изменять положение инструментов система может только с помощью хирурга. Примером может служить использование робота для удержания иглы при проведении биопсии в нейрохирургии.
Полуактивный робот выполняет ряд запрограммированных манипуляций, в определенной последовательности осуществляя движения в различных направлениях и плоскостях. Такой робот используется, например, для протезирования коленного сустава.
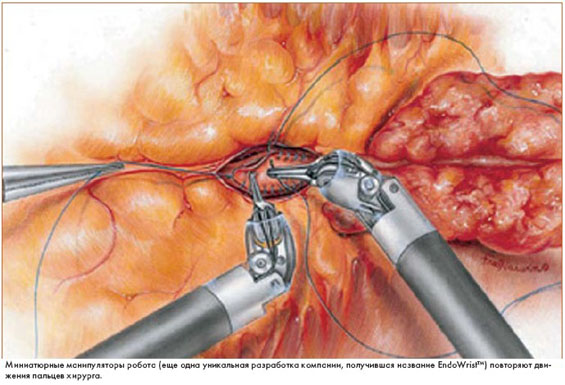
Активный робот оснащен манипуляторами, подобными рукам хирурга, и фактически сам приводит в движение инструменты. В настоящее время такими системами дистанционно управляет хирург, а механические руки робота воспроизводят движения его кистей и пальцев, увеличивая точность, уменьшая усталость и устраняя тремор. Активные системы используются для трансуретральной простатэктомии, эндоскопической телероботохирургии.
История
Первый хирургический робот Unimate Puma 560 был создан в конце 1980-х и использовался в нейрохирургии для удерживания инструментов при проведении стереотаксической биопсии.
В 1986 году Калифорнийский университет в Дэвисе и исследовательский центр Томаса Дж. Уотсона корпорации IBM начали совместную работу по созданию робота-хирурга. В 1992 году компания Integrated Surgical Systems на основе результатов этих исследований создала систему помощника хирурга, которая так и называлась - Robodoc Surgical Assistant System. Способности Robodoc в то время были скромными: он умел всего лишь шлифовать костные поверхности для лучшего контакта с имплантатом.
В те же девяностые годы в Имперском Колледже в Лондоне был создан робот для трансуретральной резекции гиперплазированной предстательной железы - Probot, допущенный к клиническим испытаниям в 1996 году. Система Probot, оснащенная ультразвуковым щупом, позволяла создать трехмерную модель простаты, быстро определить участок патологически измененной железы и произвести его резекцию.
В 1994 году компания Computer Motion изготовила первого робота-хирурга, получившего сертификат US FDA - Automated Endoscopic System for Optimal Positioning (AESOP). Это была механическая рука, наделенная семью степенями свободы движений и предназначенная для автоматического изменения положения
эндоскопа. Двумя годами позже AESOP "приобрел" слух и смог выполнять голосовые команды хирурга. А в 1998 году появился его "дальний родственник" - активный робот ZEUS, предназначенный для дистанционной эндоскопической хирургии.
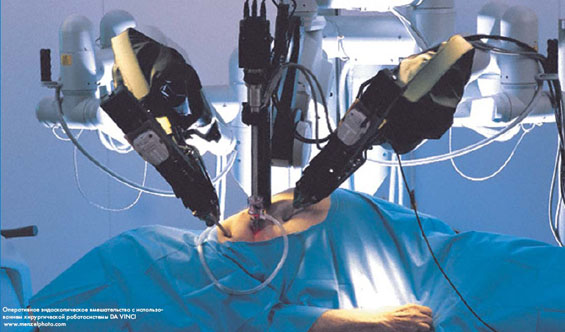
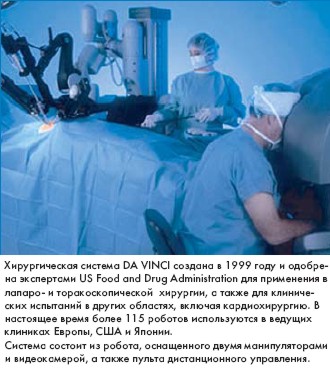
Параллельно с ZEUS создавалась другая аналогичная система, получившая название DA VINCI. В начале 90-х известная корпорация SRI International стала одним из нескольких акцепторов гранта, выставленного на конкурс правительственным агентством DARPA, на разработку методов телехирургии. Был создан прототип робота-хирурга, вдохновивший Фредерика Молла в 1995 году учредить компанию Intuitive Surgical. Здесь идеи, заложенные SRI, эволюционировали и воплотились в то, что сегодня известно как DA VINCI.
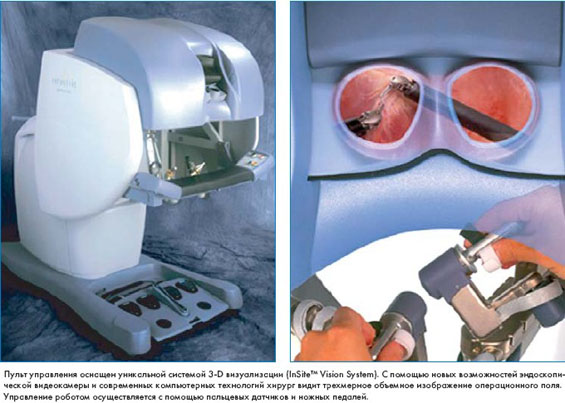
В принципе, системы DA VINCI и ZEUS имеют много общего: это активные роботы, управляемые дистанционно со специальной рабочей станции. Эти системы позволяют оператору находиться на значительном расстоянии от больного, управляя тремя "руками" робота ( две для удержания инструментов и осуществления манипуляций, а третья для продвижения эндоскопической камеры). Современная компьютерная и видеотехника создает перед глазами хирурга высококачественное изображение операционного поля.
Первоначально подобная технология разрабатывалась для применения в военных условиях, при повышенной радиации или даже в космосе, позволяя квалифицированному медперсоналу находиться вне опасности. Однако роботы "прижились" в ведущих современных клиниках, и в настоящее время в мире уже выполнены тысячи операций с использованием DA VINCI и ZEUS. Именно между этими системами сегодня развернулась основная конкурентная борьба.
Достаточно большой опыт применения роботов накоплен в области протезирования тазобедренного и коленного суставов. Системы ROBODOC и ACROBOT, например, уже имеют достаточную известность и позволяют эффективно планировать оперативное вмешательство, тщательно подготавливать кость для установки протеза в оптимальной позиции, сокращая этим время операции и уменьшая ее травматичность.
Сегодняшний день
Роботохирургия продолжает стремительно развиваться. Стала реальностью так называемая трансконтинентальная телероботохирургия. В 2001 году хирурги успешно удалили желчный пузырь с помощью дистанционно управляемого робота ZEUS, установленного в одном из госпиталей Франции , находясь от пациентки на расстоянии 7000 км в Нью-Йорке. Современные средства связи обеспечили передачу сигналов в обоих направлениях (от видеокамеры лапараскопа к хирургу и обратно - от станции управления к роботу) по трансатлантическому волоконно-оптическому кабелю.
Задержка сигнала составляла менее 200 мсек (безопасно допустимое отставание сигнала составляет около 300 мсек). Пока непосредственно возле больного должен находиться квалифицированный ассистент хирурга, который обеспечивает доступ робота в зону оперативного вмешательства. Интересно, что для безопасности пациента в случае сбоя связи или прекращения визуального контроля хирурга (достаточно отвести голову от консоля наблюдения) система входит в резервный режим ожидания, прекращая манипуляции.
В феврале 2002 года кардиохирурги из Columbia Presbyterian Medical Center (США) сообщили об успешном проведении аортокоронарного шунтирования с использованием системы DA VINCI. Сложная, но малоинвазивная операция была проведена через три небольших разреза (8-15 мм) в области грудной клетки для введения двух манипуляторов и эндоскопа. В ноябре 2002 года на сессии American Heart Association были представлены результаты 15 операций по устранению врожденного дефекта межпредсердной перегородки, проведенных в той же клинике, что положило начало открытой роботохирургии сердца без "вскрытия" грудной клетки.
В августе 2002 года в Virginia Urology Center выполнена первая успешная роботомикрохирургическая урологическая операция. С использованием все того же DA VINCI была прозведена так называемая Vasectomy Reversal - микрохирургическая операция по восстановлению целостности семявыносящих протоков.
Перспективы
Чего же можно ожидать от роботохирургии в будущем? Новые возможности манипуляторов и визуального контроля позволят довести до совершенства оперативные вмешательства на бьющемся сердце. "Руки" робота смогут двигаться в такт сокращениям, постоянно оставаясь на одинаковом расстоянии от зоны оперативного вмешательства и как бы нивелируя колебания стенки сердца. При этом операционное поле, которое хирург видит на экране, будет оставаться неподвижным.
Продолжаются работы по созданию новых роботов. В январе 2003 года ученые из Nanyang Technological University совместно с хирургами из National Neuroscience Institute (Сингапур) сообщили о создании роботосистемы, предназначенной для обеспечения хирургического доступа к глубоко расположенным опухолям головного мозга ( в области основания черепа). Робот, получивший название HEXAPOD, успешно прошел испытания в экспериментах и в настоящее время готовится к внедрению в клинику.
По материалам
www.studentbmj.com;
www.menzelphoto.com
www.physikinstrumente.de;
www.smh.com.au
www.robodoc.com;
health.discovery.com
www.computermotion.com;
www.hospitalmanagement.net
www.medinews.com;
www.americanheart.org
www.me.ic.ac.uk/case/mim/projects/acrobot/
www.computerra.ru
www.intuitivesurgical.com
www.uphs.upenn.edu;
www.physikinstrumente.de
www.me.ic.ac.uk/case/mim/projects/acrobot/
Medicus Amicus 2003, #2
|
|







 Новости
Новости 







